
AGV小车控制系统设计和运动控制,主要有以下几个常识:路径识别,交通管制,目的地识别,障碍识别,运输控制以及安全系统等。通常针对经济型磁导航AGV小车采用上位机控制排队的方法来确定AGV的顺序,以及包括流水呼叫作业运输控制的基本概念。AGV机器人
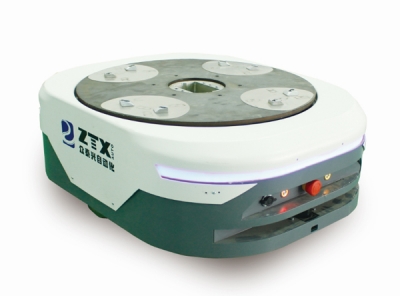
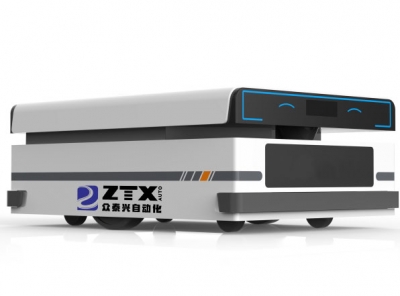
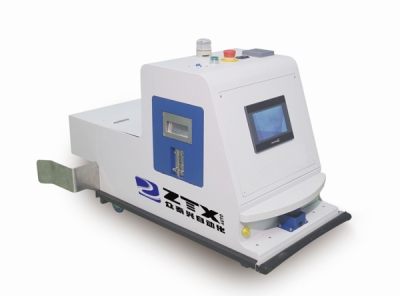
AGV小车是无人驾驶的室内运输的工具,常用于库内的生产和装配领域。其形式大致分为两类:一种是自由行走和自动绕行AGV小车另一种则是常用路径限制AGV小车。AGV小车大部分采用航位推算法,常用的是通过安装的反射板被反射的光线进行三边运算,以确定其准确位置,当然也有团队通过RF,WIFI,UWB等无线信号进行三角运算定位。同时,最近在吸尘器机器人也有采用视觉天花板定位的方式,不过不能实现精确定位。第二类AGV小车则采用被限制到一个固定的网络路径,其中常见的是电磁式(地下埋设电线)磁条或是色带,通过在地板上标记轨道来引导定位。AGV小车控制系统有常见四种形式:功能相对简单的AGV小车控制系统大部分采用单片机或是是由PLC控制;在一些功能复杂对运动控制精度和扩展性更强的AGV小车则采用专门的运动控制卡(核心板)或是工控电脑来实现高速运算。电源主要由电池或超级电容器,常见的是电池供电,包括便宜但是很笨重的铅酸电池,也有重量轻体积小的锂离子电池,在一些防爆等级较高的场所或大电流应用中则需要配备钛锂离子电池。充电形式又分为:离线充电,自动充电站充电,非接触式充电三种。